L'anticouple: un mal nécessaire ©naute 2010
En guise de préambule.
La mécanique de vol des voilures tournantes, en général, et des hélicoptères en particulier, est très complexe, et il n'est pas question, ici, d'en faire un descriptif exhaustif, car cela nous entrainerait dans des développements trop techniques pour que l'on puisse en venir à bout. A chacun son métier. On peut, toutefois, essayer d'en proposer une approche simplifiée, en limitant dans la mesure du possible le recours à la physique et aux mathématiques, et en privilégiant l'approche intuitive qui permet de comprendre le phénomène physique, à défaut d'en permettre le calcul. On va ici s'attacher à expliciter la nécessité d'avoir recours à un dispositif anticouple et à mettre en évidence certains des problèmes liés à la solution retenue dans l'immense majorité des cas, à savoir le rotor anticouple.
Toute suggestion destinée à améliorer ce petit topo, que ce soit dans sa présentation ou dans son contenu, sera bienvenue à l'adresse helico@naute.fr.
Vous
pouvez également, si vous le désirez, télécharger
la version PDF
![]()
Conditions de base.
Pour des raisons évidentes de simplification, nous allons nous placer dans le cas d'un hélicoptère en vol stationnaire dans une masse d'air immobile, à une altitude suffisante pour ne pas être perturbé par l'effet de sol. Le centre de gravité sera dans le prolongement de l'axe rotor, lequel sera confondu avec l'axe de lacet. Le rotor tournera, vue de dessus, dans le sens horaire, et l'anticouple, situé à droite de l'hélicoptère, tournera, pour une meilleure efficacité aérodynamique, dans le sens antihoraire vu de la droite. Nous essaierons, en premier lieu, de décrire le comportement de l'hélicoptère grandeur, puis, dans la mesure du possible, de faire le parallèle avec l'hélicoptère RC (modèle réduit radio commandé) en tenant compte des spécificités de celui-ci.
Au
niveau de la représentation schématique, on ne
représentera pas le cône rotor, laissant les pales
dans le prolongement l'une de l'autre décrire un cercle que
l'on assimilera au plan rotor, ce qui entrainera que le point
d'application de la portance
![]() sera
confondu avec l'intersection de l'axe des pales et de l'axe rotor,
à savoir le point O, ce qui n'est pas tout à fait le
cas dans la réalité. Ceci entrainera également,
sur les schémas montrant le rotor basculé, que la
pale basse passera en dessous du plan de référence
(plan passant par O et perpendiculaire à l'axe rotor), ce
qui n'est bien sûr pas le cas sur un rotor articulé.
sera
confondu avec l'intersection de l'axe des pales et de l'axe rotor,
à savoir le point O, ce qui n'est pas tout à fait le
cas dans la réalité. Ceci entrainera également,
sur les schémas montrant le rotor basculé, que la
pale basse passera en dessous du plan de référence
(plan passant par O et perpendiculaire à l'axe rotor), ce
qui n'est bien sûr pas le cas sur un rotor articulé.
![]() sera
bien entendu toujours perpendiculaire au plan rotor.
sera
bien entendu toujours perpendiculaire au plan rotor.
Conventions.
AB signifie la distance en ligne droite séparant les points A et B (ou la longueur du segment AB)
![]() vecteur
P: représenté par une flèche sur les schémas,
il caractérise une force ou une vitesse, grandeurs
vectorielles, par son point d'application, origine de la flèche,
son module (ou intensité), la longueur de la flèche,
et l'axe et la direction selon lesquels il agit, la flèche
en elle-même. Par analogie, les couples seront représentés
par deux vecteurs parallèles, de direction opposée
et de même module, mais il convient de ne pas confondre
couple et force.
vecteur
P: représenté par une flèche sur les schémas,
il caractérise une force ou une vitesse, grandeurs
vectorielles, par son point d'application, origine de la flèche,
son module (ou intensité), la longueur de la flèche,
et l'axe et la direction selon lesquels il agit, la flèche
en elle-même. Par analogie, les couples seront représentés
par deux vecteurs parallèles, de direction opposée
et de même module, mais il convient de ne pas confondre
couple et force.
![]() se
lit "module de P" et représente la valeur,
l'intensité de
se
lit "module de P" et représente la valeur,
l'intensité de
![]() .
.
 Quelles
sont les forces qui agissent sur l'hélicoptère?
Quelles
sont les forces qui agissent sur l'hélicoptère?
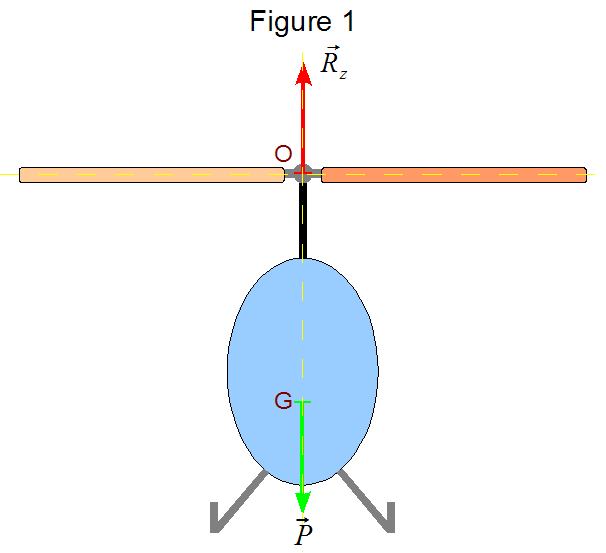
En première analyse, l'hélicoptère est en équilibre dans l'air grâce à la portance de son rotor, qui équilibre son poids.
Le
poids de l'hélicoptère est une force verticale,
dirigée de haut en bas, dont le point d'application se
situe en son centre de gravité, et dont le module (la
valeur, l'intensité...) est le produit de sa masse par
l'attraction de la pesanteur (sur Terre, g=9,81 m.s-2).
Nous appellerons cette force
![]() et la représenterons par une flèche dirigée
verticalement de haut en bas, et dont l'origine se situera au
centre de gravité de l'hélicoptère. Cette
force peut être considérée comme invariable en
première approximation. Sa valeur s'exprime comme suit:
et la représenterons par une flèche dirigée
verticalement de haut en bas, et dont l'origine se situera au
centre de gravité de l'hélicoptère. Cette
force peut être considérée comme invariable en
première approximation. Sa valeur s'exprime comme suit:
![]()
où M est la masse de l'appareil et g l'attraction de la pesanteur.
La
portance est la résultante des forces aérodynamiques
développées par le rotor, et, dans l'image
simplifiée qui en est donnée figure 1, est
égale à
![]() en
ce qui concerne son module, mais lui est opposée en ce qui
concerne sa direction. Nous appellerons cette force
en
ce qui concerne son module, mais lui est opposée en ce qui
concerne sa direction. Nous appellerons cette force
![]() et
nous pourrions noter les relations entre
et
nous pourrions noter les relations entre
![]() et
et
![]() comme
suit:
comme
suit:
![]() Vecteur
R indice Z égale moins vecteur P
Vecteur
R indice Z égale moins vecteur P
![]() Module
du vecteur R indice Z égale Module du vecteur P
Module
du vecteur R indice Z égale Module du vecteur P
Mais ce n'est malheureusement pas aussi simple car une autre force intervient, ou plutôt un couple de forces engendré par la rotation du rotor. Pendant cette rotation, en effet, la résultante des forces aérodynamiques que le vent relatif exerce sur la pale peut être décomposée en deux forces perpendiculaires:
La portance: Perpendiculaire à la direction du vent relatif, elle est verticale et dirigée vers le haut dans les conditions de base établies plus haut.
La trainée: Dans la même direction et le même sens que le vent relatif, elle est horizontale dans les conditions de base établies plus haut, et s'oppose à la rotation du rotor. Pour vaincre cette trainée, l'ensemble moteur doit imprimer un couple de forces à l'ensemble rotor par l'intermédiaire de son axe, et pour ce faire, a besoin d'un appuis. C'est cet appuis qui, transmis par l'intermédiaire du bâti moteur à l'hélicoptère lui-même, engendrera le couple de réaction qui provoquera sa rotation dans le sens inverse de celui du rotor. Quand l'hélicoptère est au sol, les forces de frottement engendrées par son poids empêchent cette rotation, mais dés qu'il s'allège, et à fortiori qu'il décolle, plus rien ne s'y oppose.
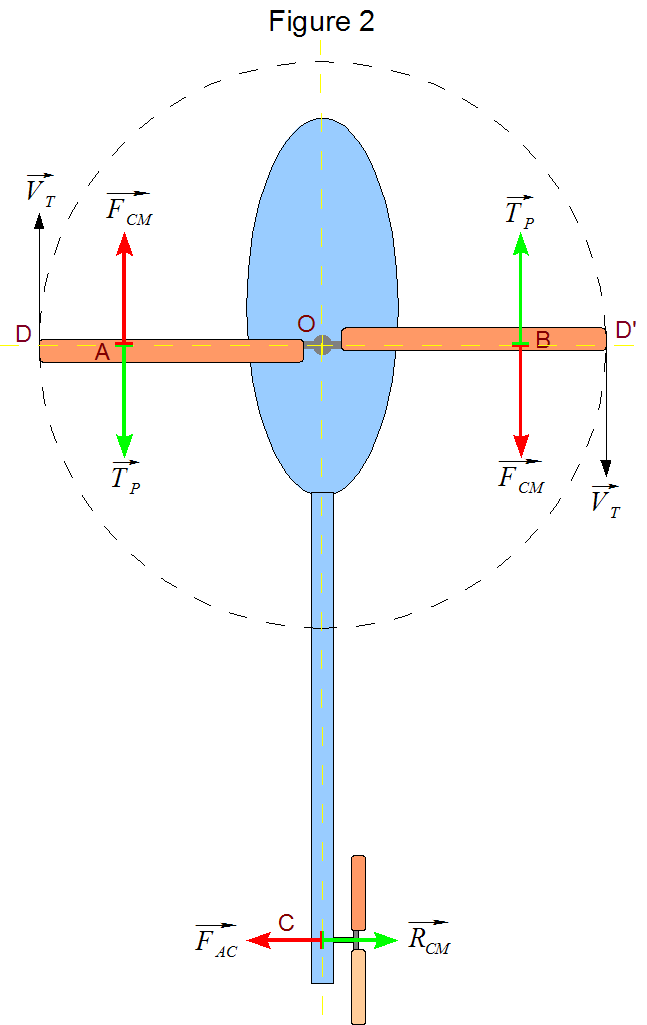 La
figure 2 (non,
ce n'est pas un spermatozoïde) donne une image simplifiée
mais néanmoins suffisante en première approximation
pour expliquer le contrôle exercé par le rotor
anticouple sur le déplacement de l'hélicoptère
autour de son axe de lacet. Quand le moteur est à l'arrêt,
on peut enlever toutes les flèches. Rien ne bouge, tout est
à l'équilibre. Les vecteurs rouges représentent
les forces motrices, les verts représentes les forces de
réaction engendrées par les forces motrices, à
savoir la Trainée des
Pales pour
La
figure 2 (non,
ce n'est pas un spermatozoïde) donne une image simplifiée
mais néanmoins suffisante en première approximation
pour expliquer le contrôle exercé par le rotor
anticouple sur le déplacement de l'hélicoptère
autour de son axe de lacet. Quand le moteur est à l'arrêt,
on peut enlever toutes les flèches. Rien ne bouge, tout est
à l'équilibre. Les vecteurs rouges représentent
les forces motrices, les verts représentes les forces de
réaction engendrées par les forces motrices, à
savoir la Trainée des
Pales pour
![]() et
la Réaction au Couple Moteur pour
et
la Réaction au Couple Moteur pour
![]()
Que se passe-t-il quand le moteur entraine le rotor?
Pour
simplifier à l'extrême, le moteur va fournir de
l'énergie au rotor, sous forme d'un couple de forces, pour
mettre celui-ci en mouvement. Ce couple de forces, que l'on va
considérer constant pour l'exemple, est représenté
par les vecteurs
![]() appliqués
en A et B, les centres de poussée des deux pales. On va
appeler ce couple
appliqués
en A et B, les centres de poussée des deux pales. On va
appeler ce couple
![]() (Couple
Moteur) et son module sera le produit
(Couple
Moteur) et son module sera le produit
![]() .
Sous l'effet de ce couple, le rotor va se mettre à tourner,
et comme le couple est constant, sa vitesse de rotation devrait
augmenter de façon constante jusqu'à destruction de
la mécanique.
.
Sous l'effet de ce couple, le rotor va se mettre à tourner,
et comme le couple est constant, sa vitesse de rotation devrait
augmenter de façon constante jusqu'à destruction de
la mécanique.
Comment cette vitesse va-t-elle se réguler?
Un
profil est caractérisé, entre autres, par deux
valeurs:
![]() ,
coefficient de trainée, et
,
coefficient de trainée, et
![]() ,
coefficient de portance, qui sont déterminés en
soufflerie, et qui varient dans le même sens en fonction de
l'incidence. La valeur de la force de trainée que l'air
exerce sur la pale en mouvement est donnée par la relation
,
coefficient de portance, qui sont déterminés en
soufflerie, et qui varient dans le même sens en fonction de
l'incidence. La valeur de la force de trainée que l'air
exerce sur la pale en mouvement est donnée par la relation
![]() ,
,
où
![]() est
la masse volumique de l'air, V la vitesse tangentielle du centre
de poussée, S la surface de la pale et CX le
coefficient de trainée. Dans les conditions de base (voir
plus haut), tant que l'on ne touche pas au Pas des pales, le seul
facteur variable est V et l'on constate donc que la force de
trainée est proportionnelle au carré de la vitesse
tangentielle du centre de poussée. On peut donc écrire
est
la masse volumique de l'air, V la vitesse tangentielle du centre
de poussée, S la surface de la pale et CX le
coefficient de trainée. Dans les conditions de base (voir
plus haut), tant que l'on ne touche pas au Pas des pales, le seul
facteur variable est V et l'on constate donc que la force de
trainée est proportionnelle au carré de la vitesse
tangentielle du centre de poussée. On peut donc écrire
![]()
et il devient dès lors évident que la vitesse limite sera atteinte quand la force de trainée sera égale à la force motrice, à savoir
![]()
Comment rester en vol stationnaire?
De la même manière, la portance va s'exprimer
![]()
mais là, nous allons faire varier RZ
en agissant sur CZ. Nous avons vu plus haut que CX
et CZ variaient dans le même sens en fonction de
l'incidence. Pour que notre hélicoptère décolle,
maintenant que le rotor tourne à vitesse stabilisée,
nous allons augmenter le Pas, ce qui va augmenter la portance RZ
mais aussi la trainée TP. Pour que le rotor ne
ralentisse pas, il va donc falloir augmenter le couple moteur pour
compenser cette augmentation de trainée. Cette compensation
est réalisée automatiquement sur les hélicoptères
grandeur par un régulateur de couple. Sur les hélicoptères
RC, on aura le choix entre le mode "governor",
équivalent au régulateur de couple des "grandeurs",
et le mixage "gaz-pas" qui permettra, une fois bien
réglé, de conserver une vitesse de rotation à
peu près constante. Dans l'hypothèse où
l'électronique est de bonne qualité, le mode
"governor" assurera une meilleure régulation des
tours rotor que le mixage "gaz-pas" mais un bon mixage
est quand même très efficace. L'hélicoptère
va donc commencer à décoller dès que la
portance va être supérieure au poids c'est à
dire![]() ,
et on le gardera en stationnaire en réduisant légèrement
le pas pour ramener la portance à la même valeur que
le poids, c'est à dire
,
et on le gardera en stationnaire en réduisant légèrement
le pas pour ramener la portance à la même valeur que
le poids, c'est à dire
![]() .
.
Notre hélicoptère a donc décollé et se trouve en stationnaire, mais le couple de réaction au couple moteur n'est plus compensé par les forces de frottement de son train sur le sol, et il tourne donc en sens inverse du sens de rotation du rotor. Pour compenser ce couple, deux solutions sont globalement possibles. Soit on lui oppose un couple égal en intensité, ce qui est réalisé sur les birotors contra-rotatifs, qu'ils soient coaxiaux ou séparés, soit on exerce une force agissant sur la structure de l'hélicoptère à distance de l'axe de lacet, et s'opposant à la rotation autours de celui-ci. Ceci est réalisé à l'aide d'un rotor anticouple (RAC) monté à distance sur l'arrière de l'appareil, cas le plus fréquent, mais on trouve aussi des solutions exotiques telle le Hugues 500 NOTAR, qui détourne une partie des gaz d'échappement de la turbine vers l'extrémité de la queue où leur sortie latérale produit un effet similaire.
Une autre solution a été un moment utilisée, qui permettait de se passer d'un quelconque dispositif anticouple. Il s'agissait, en effet, d'assurer la rotation du rotor par éjection d'un gaz sous pression envoyé dans des tuyères située en bout de pales. Ce dispositif, basé sur le principe de la réaction, ne générant pas de couple, il n'y avait plus besoin d'anticouple. Malheureusement, d'autres problèmes liés essentiellement à la difficulté d'acheminer des gaz sous haute pression dans un système rotatif à la mécanique complexe ont abouti à l'abandon de cette idée, d'autant plus que, malgré l'absence de couple à contrer, il fallait quand même un dispositif de contrôle du lacet pour permettre à l'hélicoptère de pivoter. Pour info, il s'agit de l'hélicoptère léger Djinn produit quand même à un peu moins de 200 exemplaires depuis fin 1953 et dont il reste encore une dizaine d'exemplaires en état de vol. Il est toujours, sauf erreur, détenteur du record d'altitude dans la catégorie des moins de 500 Kg, qui se situe aux alentours de 4800 m, ce qui prouve, si besoin était, que le concept tenait parfaitement la route (ou l'air).
La solution RAC est, et de très loin, la plus répandue, car la plus simple et la moins couteuse à mettre en œuvre. Mais la médaille a son revers. On ne peut pas contrer un couple à l'aide d'une simple force sans entrainer des réactions parasites.
Le déplacement latéral
 Voici
donc notre hélicoptère (si on peut dire) dont les
pales, animées par le couple moteur
Voici
donc notre hélicoptère (si on peut dire) dont les
pales, animées par le couple moteur
![]() tourne
dans le sens horaire à la vitesse
tourne
dans le sens horaire à la vitesse
![]() et
dont le cockpit animé par le couple de réaction au
couple moteur
et
dont le cockpit animé par le couple de réaction au
couple moteur
![]() tourne
dans le sens antihoraire à la vitesse
tourne
dans le sens antihoraire à la vitesse
![]() .
.
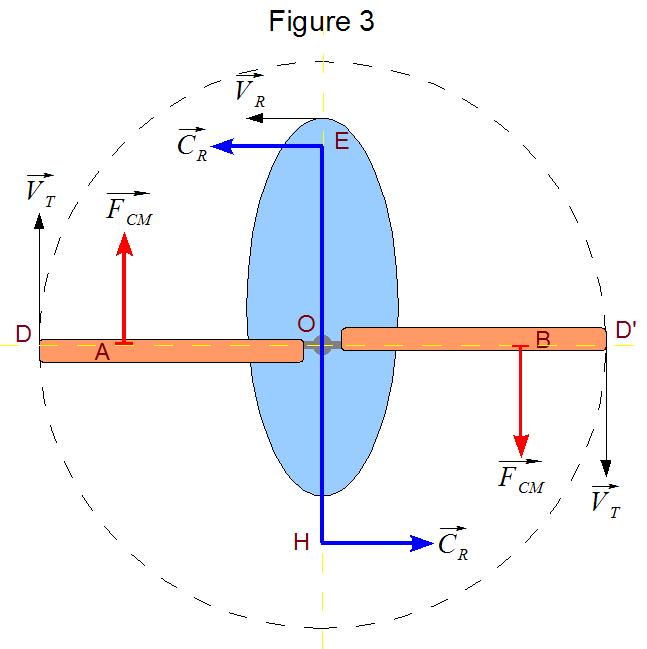
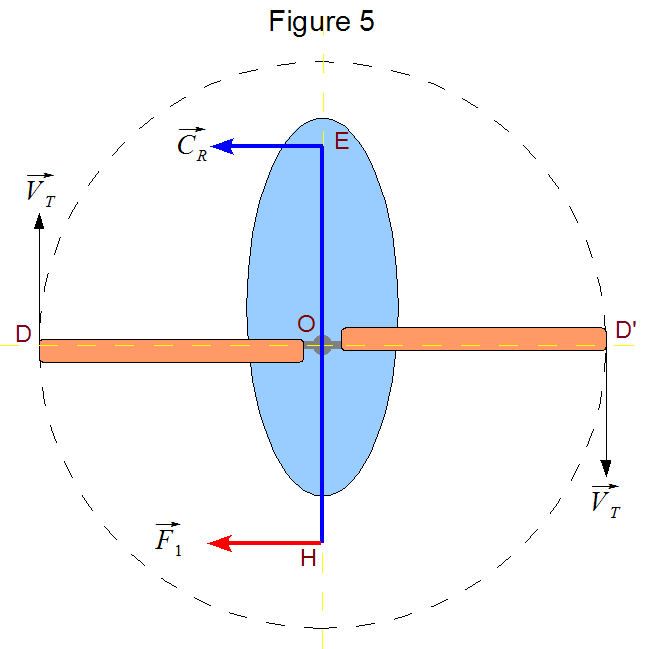
Nous
allons, en premier lieu, critiquer la figure 3. La
représentation des couples fausse la réalité
du phénomène mais il est difficile, sur un schéma,
de les représenter autrement. Les deux vecteurs
![]() et
les deux vecteurs
et
les deux vecteurs
![]() ne
représentent pas 4 forces appliquées à 4
endroits différents, mais deux couples appliqués au
point O. Les couples sont réels, mais les forces et leur
point d'application sont fictifs.
ne
représentent pas 4 forces appliquées à 4
endroits différents, mais deux couples appliqués au
point O. Les couples sont réels, mais les forces et leur
point d'application sont fictifs.
Ces couples s'expriment de manière physique par l'intermédiaire d'une grandeur appelée "moment" et dont la valeur est le produit d'une force par une distance.
Par
exemple, sur la figure 3, le couple représenté
par les deux vecteurs
![]() appliqués
aux points E et H aura pour moment le produit
appliqués
aux points E et H aura pour moment le produit![]() et
pour point d'application le point O situé sur la droite EH
et tel que OE=OH .
et
pour point d'application le point O situé sur la droite EH
et tel que OE=OH .
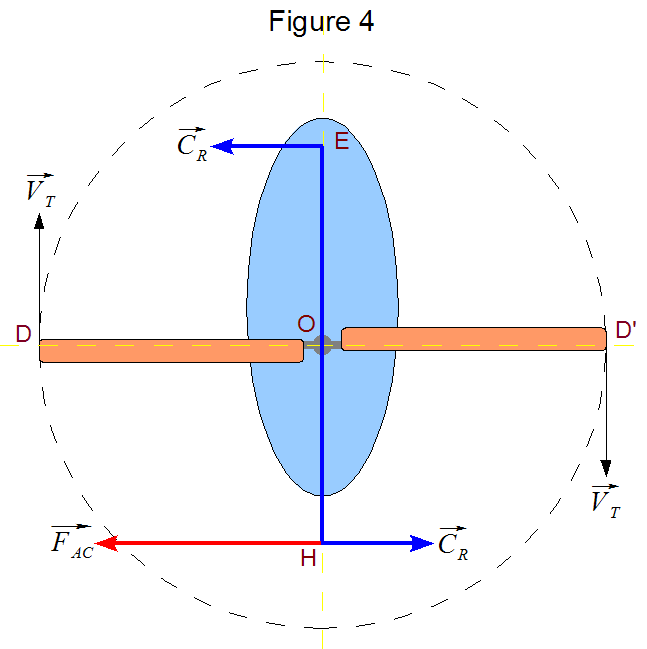
Pour
s'opposer à une grandeur, il faut une grandeur de même
type, donc, ici, un moment que l'on appellera MAC. Il
faut, également que ce moment agisse au même endroit,
et, pour qu'il y ait équilibre, que les deux moments soient
égaux et opposés, soit MAC = -MCR.
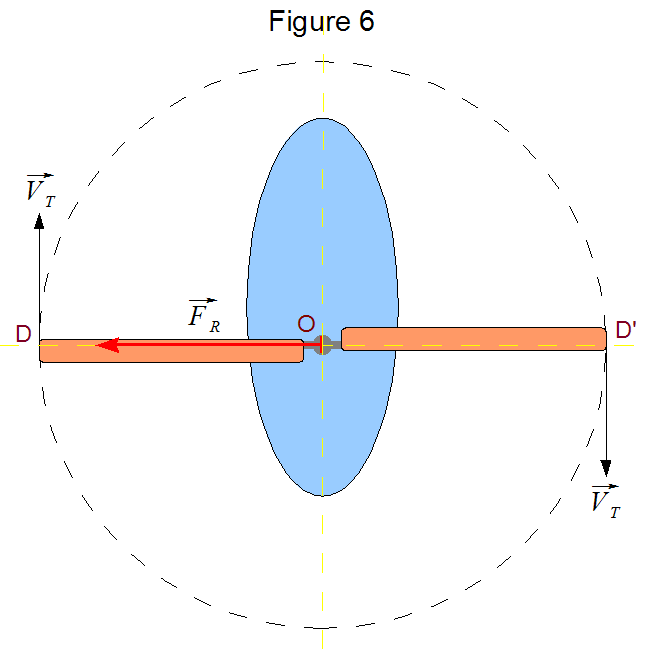
Nous allons réaliser cela en appliquant en H une force
![]() telle que son moment soit égal et opposé à
telle que son moment soit égal et opposé à
![]() ,
cela calculé par rapport au point O.
,
cela calculé par rapport au point O.
Comme
OE=OH, on peut écrire EH=2.OH et donc
![]() .
.
Le
moment de
![]() par
rapport au point O est de la forme
par
rapport au point O est de la forme![]() et
comme on a MAC = -MCR , on aura la relation
et
comme on a MAC = -MCR , on aura la relation
![]() et
donc
et
donc
![]() .
C'est ce qui est représenté sur la figure 4
(débarrassée des données inutiles) par le
vecteur
.
C'est ce qui est représenté sur la figure 4
(débarrassée des données inutiles) par le
vecteur
![]() dont
le point d'application est le point H, la direction opposée
à celle vecteur
dont
le point d'application est le point H, la direction opposée
à celle vecteur
![]() et
dont la valeur est le double de celle de
et
dont la valeur est le double de celle de
![]() .
.
Puis
après composition des forces, on voit qu'il nous reste une
force résultante
![]() .
C'est cette force qui est la cause de notre déplacement
latéral. Attention, il est bien entendu que l'on ne peut
envisager la composition des forces qu'à partir du moment
ou l'on ne parle plus en terme du moment d'un couple de forces
mais du moment de deux forces qui lui est équivalent. Ces
deux notions sont différentes mais elles ont des
similitudes qui rendent leur manipulation délicate dans un
même raisonnement.
.
C'est cette force qui est la cause de notre déplacement
latéral. Attention, il est bien entendu que l'on ne peut
envisager la composition des forces qu'à partir du moment
ou l'on ne parle plus en terme du moment d'un couple de forces
mais du moment de deux forces qui lui est équivalent. Ces
deux notions sont différentes mais elles ont des
similitudes qui rendent leur manipulation délicate dans un
même raisonnement.
Cette
force![]() est
embêtante pour deux raisons principales; le déplacement
latéral dont nous venons de parler bien sûr, mais
aussi elle est grande consommatrice de puissance. En effet, une
partie de la puissance motrice va être utilisée pour
la créer afin de contrer le couple moteur, mais une autre
partie de la puissance motrice va également devoir être
détournée pour contrer le déplacement latéral
qu'elle provoque. Il convient donc de la minimiser autant que
faire se peut.
est
embêtante pour deux raisons principales; le déplacement
latéral dont nous venons de parler bien sûr, mais
aussi elle est grande consommatrice de puissance. En effet, une
partie de la puissance motrice va être utilisée pour
la créer afin de contrer le couple moteur, mais une autre
partie de la puissance motrice va également devoir être
détournée pour contrer le déplacement latéral
qu'elle provoque. Il convient donc de la minimiser autant que
faire se peut.
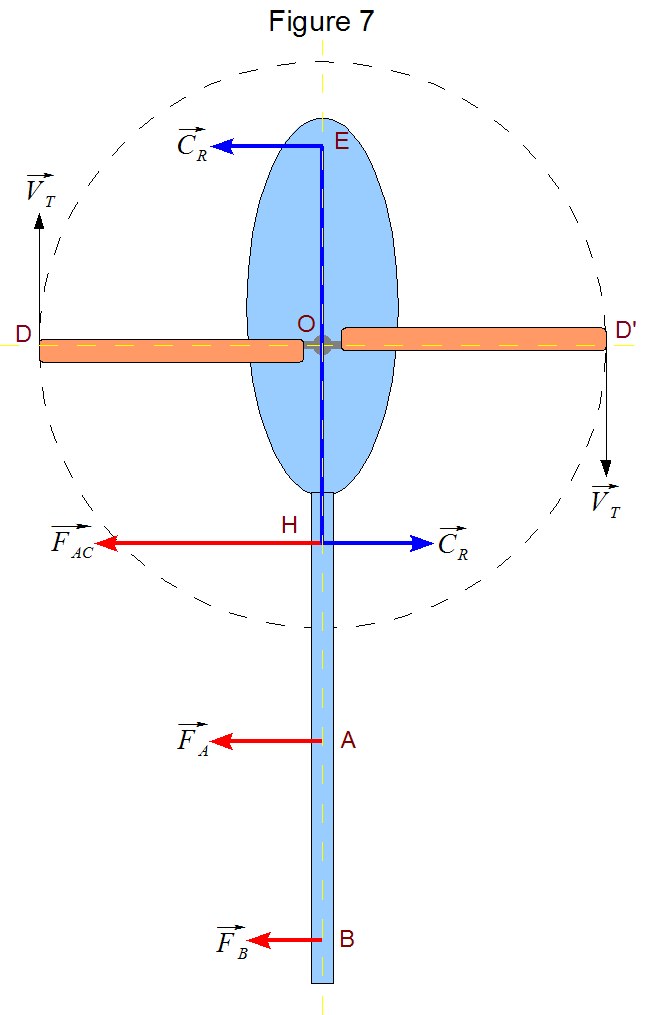 Reprenons,
en la modifiant un peu, la figure 4 et appelons la figure
7. Non, ce n'est toujours pas un spermatozoïde. Nous
savons que la force
Reprenons,
en la modifiant un peu, la figure 4 et appelons la figure
7. Non, ce n'est toujours pas un spermatozoïde. Nous
savons que la force
![]() ne
compense pas la force fictive
ne
compense pas la force fictive
![]() mais
que c'est son moment qui compense celui de
mais
que c'est son moment qui compense celui de
![]() .
Or, le moment de
.
Or, le moment de
![]() est
constant puisque, selon les conditions de départ, nous
sommes en vol stationnaire etc...
est
constant puisque, selon les conditions de départ, nous
sommes en vol stationnaire etc...
Donc,
c'est le moment de
![]() ,
soit
,
soit
![]() qui
doit rester constant. Le produit étant constant,
l'augmentation d'un des facteurs entraine la diminution de l'autre
dans les même proportions.
qui
doit rester constant. Le produit étant constant,
l'augmentation d'un des facteurs entraine la diminution de l'autre
dans les même proportions.
C'est ce que montre la figure 7. Si j'applique la force en A, sachant que OA=2.OH, alors FA=1/2 .FAC etc...
Nous comprenons là pourquoi les hélicoptères ont souvent une queue plus longue que ce qui semblerait nécessaire au premier abord. De plus, en translation, la dérive située en fin de queue sera d'autant plus stabilisatrice que la queue sera longue.
Mais, car il y a toujours un mais, une longueur excessive entrainera une trop grande sensibilité aux turbulences et, comme à l'accoutumée, la bonne longueur sera affaire de compromis (oui, je sais, elle était facile).
Comment contrôler le déplacement latéral?
 Reprenons,
en la modifiant, la figure 1.
Reprenons,
en la modifiant, la figure 1.
La
portance du rotor, appelée ici
![]() ,
est la seule force sur laquelle on puisse agir, tant en direction,
en faisant varier le pas cyclique pour incliner le plan rotor,
qu'en intensité, en faisant varier le pas collectif.
,
est la seule force sur laquelle on puisse agir, tant en direction,
en faisant varier le pas cyclique pour incliner le plan rotor,
qu'en intensité, en faisant varier le pas collectif.
![]() est
toujours perpendiculaire au plan rotor.
est
toujours perpendiculaire au plan rotor.
Il
suffit donc d'incliner le plan rotor vers la droite pour que
![]() s'incline
dans le même sens en donnant naissance à une
composante horizontale
s'incline
dans le même sens en donnant naissance à une
composante horizontale
![]() égale
et opposée à
égale
et opposée à
![]() ainsi
qu'à une composante verticale
ainsi
qu'à une composante verticale
![]() égale
et opposée au poids
égale
et opposée au poids
![]() de
l'hélicoptère.
de
l'hélicoptère.
L'inclinaison
du plan rotor est à l'évidence très exagérée,
ceci pour bien mettre en relief le phénomène. Il
apparait clairement sur le schéma que le nouveau vecteur
![]() est
plus grand que le vecteur
est
plus grand que le vecteur
![]() ,
lequel a la même valeur que celle qu'avait le vecteur
,
lequel a la même valeur que celle qu'avait le vecteur
![]() quand
le plan rotor était horizontal. Il a donc fallu augmenter
la portance du rotor pour garder la même sustentation, ce
qui est normal puisqu'une partie de cette portance sert maintenant
à empêcher la dérive de l'hélicoptère
due à l'anticouple.
quand
le plan rotor était horizontal. Il a donc fallu augmenter
la portance du rotor pour garder la même sustentation, ce
qui est normal puisqu'une partie de cette portance sert maintenant
à empêcher la dérive de l'hélicoptère
due à l'anticouple.
Nous
considèrerons, ce qui est faux en raison du moment de
![]() par rapport à G qui devient non nul, et pour nous
concentrer sur l'action du rotor anticouple, que cette inclinaison
du plan rotor n'affecte pas l'assiette de l'hélicoptère
car le rotor est articulé. Ce type de rotor
est très peu répandu sur les hélicoptères
RC, chez lesquels on rencontre deux grandes familles.
par rapport à G qui devient non nul, et pour nous
concentrer sur l'action du rotor anticouple, que cette inclinaison
du plan rotor n'affecte pas l'assiette de l'hélicoptère
car le rotor est articulé. Ce type de rotor
est très peu répandu sur les hélicoptères
RC, chez lesquels on rencontre deux grandes familles.
La famille des FP (Fix Pitch pour Pas collectif fixe). Cette famille se caractérise par un rotor dont les deux pales sont solidaires et forment ce que l'on appelle un rotor à balancier. Ce type de rotor, muni d'une barre de Bell, a été utilisé en grandeur notamment sur le Bell 47 (5600 exemplaires produits à ce jour, quand même, toutes versions confondues). Il est utilisé en modèle réduit RC associé à une barre de Hiller simplifiée (pas de commande de collectif, les variations de portance étant obtenues par la variation de la vitesse de rotation du rotor) dont la constante de temps, très supérieure à celle du rotor, associée à une plus faible sensibilité aux perturbations aérodynamiques, en fait un stabilisateur mécanique efficace. Son défaut est d'entrainer également un retard non négligeable et une réponse plus faible aux ordres du pilote. Grâce à ce type de rotor dont le plan n'est pas forcément perpendiculaire à l'axe, on peut dire que les FP sont plus proches des grandeurs au niveau du comportement que les CP. Pour les FP, la figure 8 reste valable.
 La
famille des CP (Collective Pitch pour Pas collectif
variable). Dans cette famille, la mécanique de liaison
entre les pales et l'axe du rotor est telle que le plan rotor est
toujours perpendiculaire à celui-ci, ce qui a pour
conséquence que l'inclinaison du plan rotor entraine
inévitablement l'inclinaison de l'hélicoptère
d'une quantité équivalente. La mécanique de
commande est une variante de la barre de Hiller appelée
barre de Bell-Hiller, dont l'effet stabilisateur est équivalent
à celui de la barre de Hiller tout en gommant l'essentiel
de ses défauts au prix d'une complexité supérieure.
La
famille des CP (Collective Pitch pour Pas collectif
variable). Dans cette famille, la mécanique de liaison
entre les pales et l'axe du rotor est telle que le plan rotor est
toujours perpendiculaire à celui-ci, ce qui a pour
conséquence que l'inclinaison du plan rotor entraine
inévitablement l'inclinaison de l'hélicoptère
d'une quantité équivalente. La mécanique de
commande est une variante de la barre de Hiller appelée
barre de Bell-Hiller, dont l'effet stabilisateur est équivalent
à celui de la barre de Hiller tout en gommant l'essentiel
de ses défauts au prix d'une complexité supérieure.
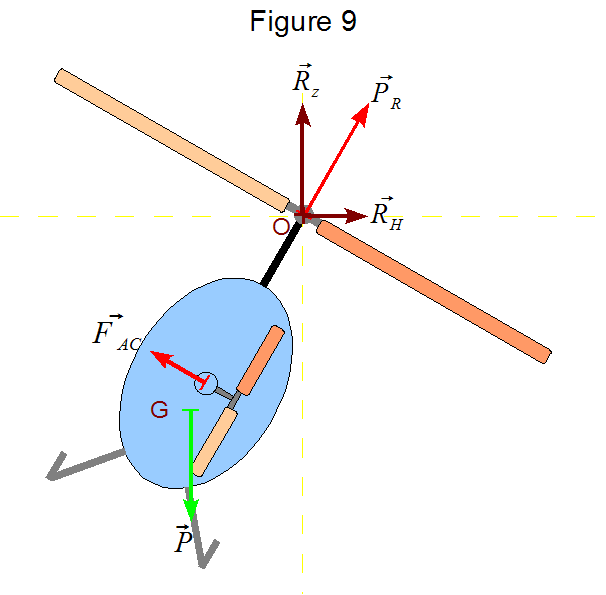
Ceci explique l'air penché que l'on constate sur un beau stationnaire bien stable, et nous oblige à réaliser la figure 9 pour rendre compte du phénomène. Pas d'inquiétude pour ce surcroit de travail, ce schéma va bientôt être réutilisé car, si on regarde bien, il met en évidence d'autres problèmes.
Ce type de rotor, appelé rotor fixe, n'est pas envisageable en grandeur en raison des contraintes mécaniques élevées dont il serait à la fois la cause et l'objet, mais en modélisme, la différence d'échelle et les conditions d'utilisation font que ces contraintes deviennent acceptables.
De plus, les possibilités d'évolution qu'il offre sont telles qu'il serait dommage de s'en passer, et que la limite viendra le plus souvent du pilote.
Nous sommes donc partis d'un stationnaire dans lequel on ne gérait que l'altitude, puis avons ajouté un rotor anticouple pour empêcher notre hélicoptère de tourner sur lui même. Nous avons du, ensuite, incliner notre rotor pour empêcher notre machine de dériver, puis augmenter la portance pour compenser la perte de sustentation. Nous voici enfin sur un stationnaire bien stable. Le problème est réglé.
Eh bien non! Pas encore. Le grandeur aussi penche, malgré son rotor articulé. Pourquoi?
Encore
un problème de couple? (Pas étonnant qu'il y ait
autant de divorces). Eh bien oui et non selon qu'on considère
le couple de forces![]() et
et![]() ou
le moment de la force
ou
le moment de la force![]() par
rapport au point fixe O. Étant pour la paix des ménages,
je préfère opter pour la seconde solution, mais cela
revient rigoureusement au même (heureusement).
par
rapport au point fixe O. Étant pour la paix des ménages,
je préfère opter pour la seconde solution, mais cela
revient rigoureusement au même (heureusement).
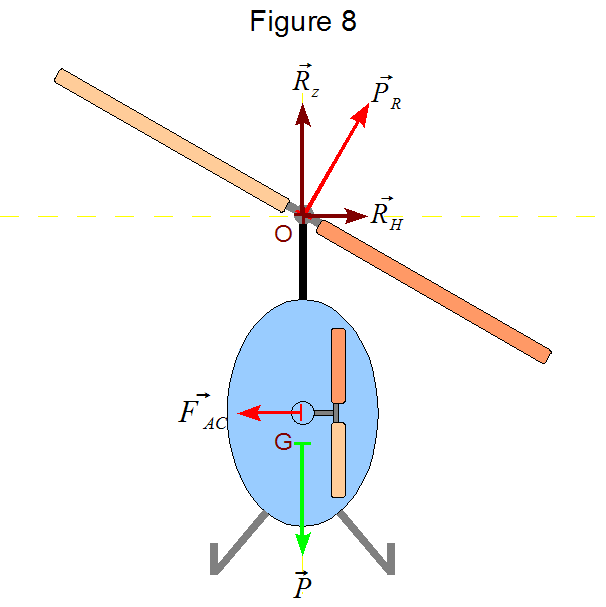
Revenons
à notre figure 8. Nous considérons donc que
nous sommes en présence d'un objet (l'hélicoptère)
suspendu librement (rotor articulé) à un point fixe
(vol stationnaire) appelé O, auquel on applique en un point
quelconque, mais différent de O, une force
![]() .
Nous savons que, comme tout ce qui précède, c'est
une approximation de la réalité, mais c'est une
bonne approximation. Nous savons tous, également que cela
va nous donner quelque chose qui va ressembler à la figure
9. Oui, mais pas pour les même raisons. Ici, c'est le
moment de la force
.
Nous savons que, comme tout ce qui précède, c'est
une approximation de la réalité, mais c'est une
bonne approximation. Nous savons tous, également que cela
va nous donner quelque chose qui va ressembler à la figure
9. Oui, mais pas pour les même raisons. Ici, c'est le
moment de la force
![]() par
rapport au point O qui va obliger la machine à basculer
suivant son axe de roulis (axe longitudinal), et non pas sa
sujétion à la perpendiculaire au plan rotor.
par
rapport au point O qui va obliger la machine à basculer
suivant son axe de roulis (axe longitudinal), et non pas sa
sujétion à la perpendiculaire au plan rotor.
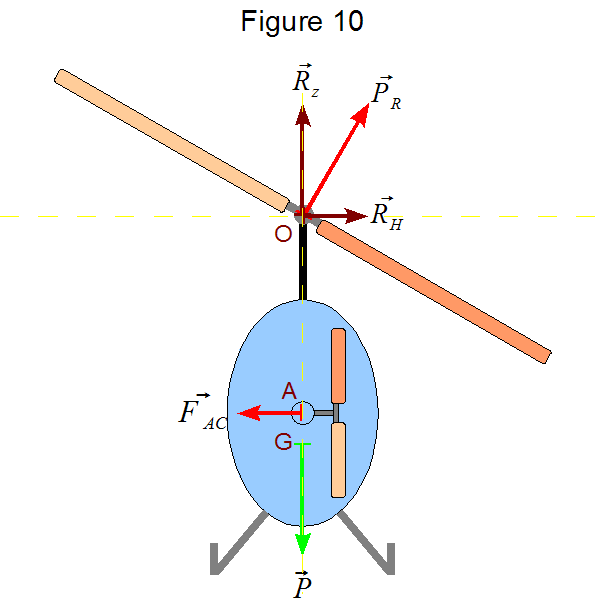
Est-t-il
possible d'intervenir pour supprimer ce phénomène?
Mais bien sûr (mon cher Thierry). Si nous appelons A le
point ou s'exerce la force contrarotative, le moment M de cette
force par rapport au point O vaudra
![]() .
Or, nous voulons que M soit égal à 0 mais ne pouvons
intervenir sur
.
Or, nous voulons que M soit égal à 0 mais ne pouvons
intervenir sur
![]() dont
nous avons besoin pour empêcher notre hélicoptère
de pivoter. Seule solution:
dont
nous avons besoin pour empêcher notre hélicoptère
de pivoter. Seule solution:
![]() ,
c'est à dire surélever notre rotor anticouple afin
qu'il agisse dans le plan horizontal passant par le centre du
rotor. Cette surélévation est très facile à
réaliser sur le papier: il suffit de passer de la figure
10 à la figure 11.
,
c'est à dire surélever notre rotor anticouple afin
qu'il agisse dans le plan horizontal passant par le centre du
rotor. Cette surélévation est très facile à
réaliser sur le papier: il suffit de passer de la figure
10 à la figure 11.
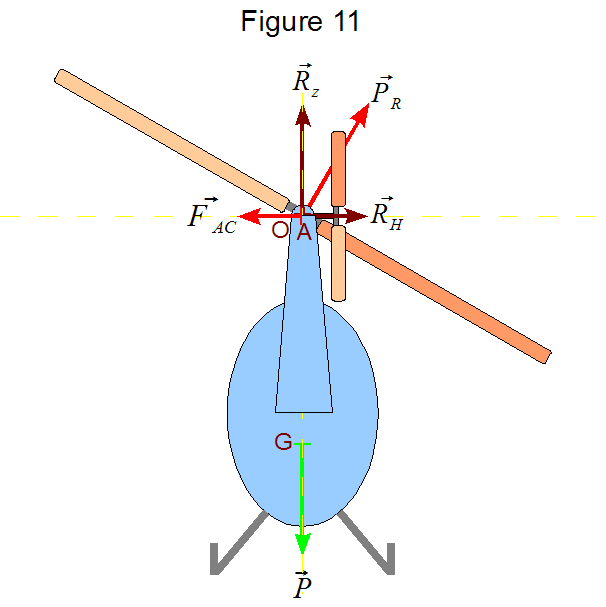
Nous
voyons bien que, maintenant, le point O étant sur le même
plan horizontal que le point A, le moment vertical de
![]() n'existe
plus, ou, si l'on considère les couples, la force
n'existe
plus, ou, si l'on considère les couples, la force
![]() agissant
dans le même plan horizontal que la force
agissant
dans le même plan horizontal que la force![]() ,
aucun couple ne peut être induit sur le plan vertical par
ces deux forces.
,
aucun couple ne peut être induit sur le plan vertical par
ces deux forces.
Cette surélévation de l'anticouple est réalisée sur bon nombre d'hélicoptères de moyen ou gros tonnage, et donne le profil bien connu à la queue cassée, comme sur le Super Frelon. Toutefois, cette technique a un coût sur le plan financier tant à la fabrication (cellule et transmission plus complexe) qu'à l'utilisation (l'augmentation du poids et les renvois de la transmission augmentent la consommation de carburant, sans parler de la maintenance) et ne se justifie donc pas sur les hélicoptères léger qui, en raison de leur faible inertie, sont extrêmement sensibles aux perturbations aérodynamiques, et doivent de toute manière être contrôlés en permanence par le pilote.
Pour la même raison, ce type de compensation n'a aucun intérêt pour un hélicoptère RC, excepté bien sûr dans le cadre de la reproduction la plus fidèle possible d'un hélicoptère grandeur, mais nous rentrons alors dans le domaine du maquettisme et il s'agit, en conséquence, de régler un problème esthétique et non un problème technique.
Il existe cependant une solution, peu répandue il est vrai, pour atténuer quelque peu cette inclinaison sans surcoût de construction, et qui offre en plus l'intérêt de diminuer légèrement la consommation.
Reprenons, comme promis, notre figure 9, en effectuant quelques ajustements. Nous obtenons la figure 12.
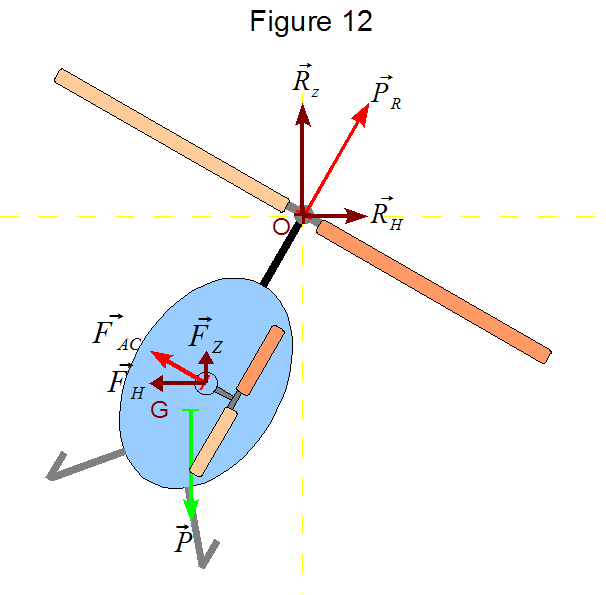 Nous
constatons déjà que les forces
Nous
constatons déjà que les forces
![]() et
et
![]() sont
parallèles et de direction opposée. Elles
constituent donc un couple de forces qui, sans le détailler,
a manifestement une action bénéfique (sauf pour les
hélicoptères RC de la famille des CP) puisqu'il tend
à redresser la machine. Ce couple de force existera dans
tous les cas de figure dès que l'hélicoptère
prendra du roulis, quelle qu'en soit la raison, et dans la mesure
ou il travaille dans le bon sens, on n'a pas intérêt
à y toucher, pour autant que cela soit possible.
sont
parallèles et de direction opposée. Elles
constituent donc un couple de forces qui, sans le détailler,
a manifestement une action bénéfique (sauf pour les
hélicoptères RC de la famille des CP) puisqu'il tend
à redresser la machine. Ce couple de force existera dans
tous les cas de figure dès que l'hélicoptère
prendra du roulis, quelle qu'en soit la raison, et dans la mesure
ou il travaille dans le bon sens, on n'a pas intérêt
à y toucher, pour autant que cela soit possible.
Occupons
nous plutôt de
![]() dont
le cas est plus intéressant.
dont
le cas est plus intéressant.
![]() ,
qui n'est autre que la "portance" du rotor anticouple,
que l'on appelle aussi "poussée", est en tant que
telle toujours perpendiculaire au dit rotor. Du fait de son
inclinaison, qui suit celle de l'hélicoptère, sur
l'axe de roulis, on peut la décomposer en deux forces,
l'une verticale que l'on appellera
,
qui n'est autre que la "portance" du rotor anticouple,
que l'on appelle aussi "poussée", est en tant que
telle toujours perpendiculaire au dit rotor. Du fait de son
inclinaison, qui suit celle de l'hélicoptère, sur
l'axe de roulis, on peut la décomposer en deux forces,
l'une verticale que l'on appellera![]() et l'autre horizontale que l'on appellera
et l'autre horizontale que l'on appellera
![]() pour
mieux appréhender son effet.
pour
mieux appréhender son effet.
L'action
de
![]() est,
manifestement, de soulever la queue de l'hélicoptère,
et donc d'introduire un moment à piquer qui, en raison du
décalage de 90° du à l'effet gyroscopique, va
augmenter l'inclinaison de la machine vers la droite. Ce n'est pas
ce qu'on cherche.
est,
manifestement, de soulever la queue de l'hélicoptère,
et donc d'introduire un moment à piquer qui, en raison du
décalage de 90° du à l'effet gyroscopique, va
augmenter l'inclinaison de la machine vers la droite. Ce n'est pas
ce qu'on cherche.
Quant
à
![]() ,
composante horizontale de
,
composante horizontale de
![]() ,
qui doit compenser
,
qui doit compenser
![]() ,
elle est évidemment inférieure en intensité à
,
elle est évidemment inférieure en intensité à
![]() et donc à
et donc à![]() .
Il va donc falloir augmenter
.
Il va donc falloir augmenter
![]() d'un
facteur égal à
d'un
facteur égal à
![]() ce
qui va augmenter encore plus l'inclinaison.
ce
qui va augmenter encore plus l'inclinaison.
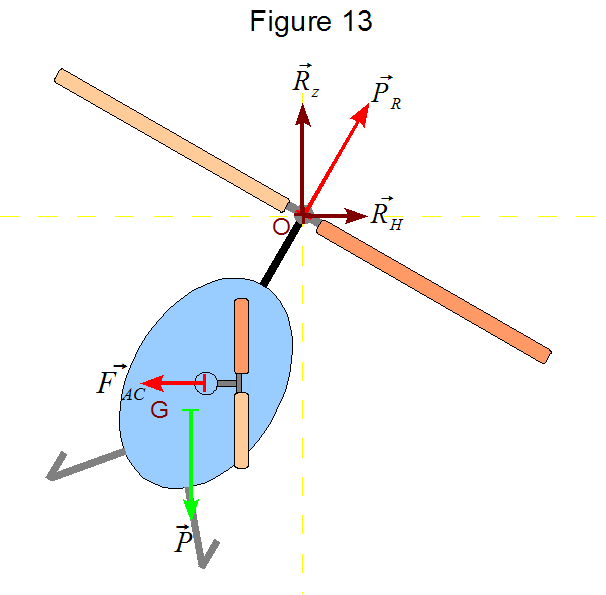
Une solution simple consiste à faire en sorte que l'inclinaison de l'hélicoptère, dans des conditions standard de vol, entraine une poussée horizontale de la part de l'anticouple, ce qui est réalisé sur la figure 13, en admettant, bien sûr, que l'inclinaison retenue pour le schéma soit la bonne, ce qui n'est pas le cas, heureusement.
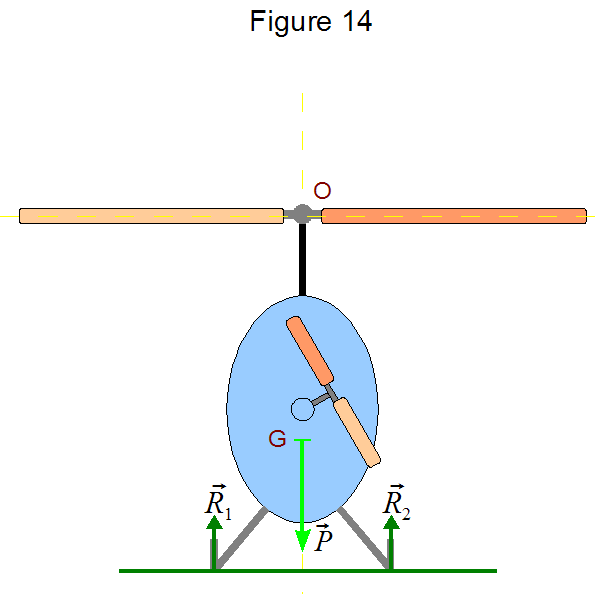
La
figure 14 représente notre hélicoptère
posé, soumis à son unique poids
![]() et
à la réaction du sol
et
à la réaction du sol
![]() ,
avec son anticouple bizarrement incliné. Bien entendu,
l'inclinaison de l'anticouple pose quelques problèmes,
notamment au décollage où il aura tendance à
plaquer la queue au sol, mais c'est le but même de la
qualification que d'enseigner au pilote les particularités
de la machine qu'il utilise.
,
avec son anticouple bizarrement incliné. Bien entendu,
l'inclinaison de l'anticouple pose quelques problèmes,
notamment au décollage où il aura tendance à
plaquer la queue au sol, mais c'est le but même de la
qualification que d'enseigner au pilote les particularités
de la machine qu'il utilise.
Qu'en est-il pour nos hélicoptères RC. Ce que nous venons de voir peut s'appliquer aux FP, bien que cela soit de peu intérêt, comme nous allons le voir. Cela ne s'appliquera de toute manière pas aux CP pour la raison suivante. La sur-motorisation de nos hélicoptères par rapport à leur poids, comparée à celle des grandeurs, est énorme. Compte tenu de ce fait et du fait que la liaison entre le rotor et la cellule est rigide sur les CP, c'est essentiellement la position du rotor qui imposera la position de la cellule sur l'axe de tangage et sur l'axe de roulis. Il est donc illusoire d'essayer de corriger ces forces parasites, d'autant plus que pour ceux qui souhaitent pratiquer la voltige, il est important que l'appareil soit le plus neutre possible dans toutes les positions.
Pourquoi, d'autre part, est-il de peu d'intérêt de corriger l'assiette de nos hélicoptères RC? Répondons plutôt à la question suivante. Pourquoi est-il souhaitable de la corriger sur les grandeurs?
Eh bien les grandeurs sont habités. C'est une première raison. Deuxième raison, la durée moyenne de vol d'un grandeur se mesure plus en heures qu'en minutes et une mauvaise position, si elle peut être acceptable pendant quelques minutes, devient vite franchement pénible. La troisième raison vient de l'utilisation même des deux types d'appareils. En grandeur, on va surtout se déplacer d'un point à un autre, en ligne droite (dans le meilleur des cas...hips), à la vitesse de croisière de la machine qui est un compromis essentiellement d'ordre financier (ratio consommation/usure/durée du trajet/etc...). Il est alors intéressant de tout mettre en œuvre pour que dans ces conditions de vol, qui représentent 80% (au pif) de l'utilisation de l'appareil, celui-ci soit le plus à plat possible.
Pour nos machines à nous, mis à part le fait qu'elle soient inhabitées, quel est l'intérêt d'optimiser l'assiette dans une condition de vol précise, alors que durant la petite dizaine de minutes que durera la prestation, elles ne passeront que quelques secondes, et le plus souvent en transition, dans cette position privilégiée, excepté bien sûr pour ceux qui s'entrainent pour le championnat du monde de vol stationnaire (attention! un beau stationnaire point fixe demande plus de maîtrise qu'une translation).
Pour aller plus loin.
Il est évident que nous n'avons fait que soulever le voile, mais il faut impérativement éviter les maux de crâne. Nous venons donc de mettre en évidence quelques problèmes liés à l'utilisation d'un rotor anticouple et de présenter quelques unes des solutions destinées à les résoudre. Mais qu'en est-il du pilotage.
Dans tous les cas, le pilote doit utiliser la commande de pas cyclique pour basculer le rotor dans le but de compenser la dérive latérale, que ce soit en stationnaire ou en translation. Cette action continue dans le même sens sur le manche à balai n'est pas souhaitable, et pourrait se comparer à la conduite d'une automobile quand, pour un défaut de géométrie par exemple, elle "tire" disons à droite. Il faut constamment compenser vers la gauche, et c'est à la fois fatiguant et potentiellement dangereux.
Deux stratégies sont utilisées pour supprimer cet inconvénient lors de l'utilisation standard (80% du temps au pif) de l'hélicoptère. La première consiste à faire ce que nous réalisons sur nos RC quand nous trimons une commande. On décale le neutre du manche à balai en s'arrangeant pour qu'en l'absence d'action sur le cyclique latéral, celui-ci soit incliné de la quantité voulue pour incliner le plan rotor de manière à compenser cette dérive "standard". L'autre stratégie consiste tout simplement (si on peut dire) à incliner l'axe rotor de l'angle voulu pour pour obtenir la même compensation. L'intérêt par rapport à la technique précédente est qu'au neutre, le plateau cyclique est perpendiculaire à l'axe rotor, ce qui est plus satisfaisant. L'inconvénient est que l'hélicoptère devient, par construction, résolument dissymétrique.
Une autre aide au pilotage est également assez répandue: il s'agit du couplage collectif→anticouple. En effet, le couple moteur varie selon qu'on augmente le pas collectif pour augmenter la portance (monter ou accélérer) ou qu'on le diminue pour diminuer celle-ci (descendre ou décélérer). Cette variation systématique du couple moteur impose au pilote une compensation aussi systématique au palonnier. L'idée est de commander automatiquement, après détermination des coefficients de couplage convenable, la variation du pas de l'anticouple quand on fait varier manuellement le pas collectif du rotor principal.
Enfin, une autre aide au pilotage, mais nettement plus confidentielle, existe. On ne la trouve guère que sur les gros tonnages, d'ailleurs. Il s'agit du couplage anticouple→cyclique. Quand on fait varier la poussée de l'anticouple, on doit compenser en même temps la variation induite de la dérive. C'est ce que réalise automatiquement ce couplage.
Pour donner un exemple, sans aucun couplage, sur notre hélicoptère, quand on met du collectif pour monter, on va pivoter vers la gauche. On va donc devoir mettre du palonnier à droite pour garder notre cap apparent. Mais en mettant du palonnier à droite, on va provoquer une dérive vers la gauche. On va donc devoir également mettre du cyclique à droite pour compenser cette dérive et garder notre cap réel.
Avec le premier couplage, si on met du collectif pour monter, il suffira de mettre du cyclique à droite pour garder notre cap réel.
Avec les deux couplages, on met du collectif pour monter. Point.
Ceci est bien sûr théorique, et il est raisonnable de laisser un pilote dans l'appareil, à défaut de quoi la situation pourrait bien dégénérer assez rapidement, mais c'est le principe.
Et en guise de conclusion.
Les hélicoptères restent des machine instables par essence. Tout le monde a sans doute joué, au moins une fois dans sa vie, à tenir une tige quelconque en équilibre verticalement sur un doigt, en déplaçant le doigt pour rétablir l'équilibre dès que la tige se met à pencher d'un coté. Si on réagit trop tard, il n'est plus possible de rétablir la situation. Si on réagit trop fort, on déséquilibre la tige de l'autre coté. La bonne solution consiste en un léger ajustement dès que le moindre déséquilibre est constaté. C'est, toute proportion gardée, naturellement, ce que l'on constate sur un hélicoptère. On peut dire que nombreux sont ceux qui ont déjà touché au pilotage d'un hélicoptère, un hélicoptère dont la cellule serait une tige, et le manche à balais un doigt.